

Réalisation de stacking à moindre coût
Jean-Luc Designolle – AFM Rhône-Alpes
Dans cette note, je ne vais que décrire un dispositif de stacking que nos amis du club Béryl de Tournefeuille (31) ont patiemment mis au point et qui nous a été présenté par Jean Alzieu lors de la bourse d’échanges de Colomiers en 2019. Les explications étaient bonnes puisque, moi qui ne suis ni un grand bricoleur et ni un électronicien, j’ai réussi à assembler et à faire fonctionner ce montage à faible coût.
Le principe du stacking : lorsqu’on prend nos échantillons en photo, la profondeur de champ de chaque cliché est très faible et nous avons recours à des logiciels qui recomposent une photo nette à partir de dizaines de clichés, en ne retenant que la partie nette de chacun. Au passage, ces logiciels peuvent corriger des aberrations chromatiques. Les plus courants de ces logiciels sont Combine ZP, Zerene Stacker, Helicon focus, etc… Mais ce n’est pas l’objet de cette petite note. Avant d’assembler nos clichés, il faut donc prendre une série de photos avec une mise au point différente, l’ensemble balayant toute la profondeur de champ que nous souhaitons atteindre. C’est cette étape que le montage présenté ici permet d’automatiser. Rien n’est en effet plus rébarbatif que de prendre une photo, déplacer la mise au point de quelques dixièmes de millimètres, attendre que l’ensemble arrête de trembler puis déclencher une nouvelle photo…
Le matériel nécessaire :
- Un support pour l’échantillon ; le déplacement vertical de ce support doit pouvoir être commandé par une vis micrométrique ;
- Un ordinateur : un logiciel permet de contrôler l’appareil photo. Il permet de visualiser le futur cliché et les photos prises sont directement stockées dans la mémoire du disque dur ;
- Les cartes électroniques qui permettent de commander le déclenchement de l’appareil photo mais aussi un moteur pas à pas qui fait tourner pour vous la vis micrométrique ;
- La pièce de liaison entre le moteur pas à pas et la vis micrométrique.
Ainsi, une fois les éclairages réglés, la profondeur de champ déterminée, vous pouvez lancer la prise des photos et vaquer à vos occupations…
1 - Le support pour échantillon avec vis micrométrique. Nos amis du club de Tournefeuille utilisent une mini-plateforme dénichée sur le site (chinois) d’optics-focus.com Celle-ci coûte 48$ en juin 2020, auxquels il faut rajouter 35$ de frais de port et 2,49$ de commission paypal. Quelques mois après la commande, j’ai eu la désagréable surprise de voir arriver une relance de Fed-Ex pour des frais de douanes de 30 € que je n’avais pas acquittés. J’attends toujours le justificatif ou une facture de ces frais que je leur ai courtoisement demandé par mail…
Ce support est de loin le plus gros poste de dépense de notre stacker pour un résultat qui ne m’a pas donné complète satisfaction : la vis micrométrique n’est pas très fine et surtout, dans le montage que j’avais fait, le plateau avait des déplacements latéraux relativement importants entre deux clichés.
J’ai maintenant opté pour la vis micrométrique d’un vieux microscope. J’ai démonté la partie optique de celui-ci et ai installé un plateau en bois suffisamment large pour supporter mon échantillon et mes éclairages ; ainsi l’éclairement ne varie pas d’un cliché à l’autre puisque c’est l’ensemble qui se déplace (Mon montage est vertical).
2 - Pour la partie électronique, les achats à réaliser sont les suivants :
Sur le site gotronic.fr :
- Une carte électronique Arduino MEGA2560 R3 à 19.90€ ; c’est elle qui va commander l’ensemble du dispositif. La carte est livrée avec le câble qui permet de la relier à un port USB de l’ordinateur ;
- Une seconde carte électronique munie d’un écran « Schield LCD 2x16 DFR0009 » à 11.90€. Cette carte vient s’insérer directement sur les ports de la carte MEGA ; elle permet d’afficher où vous en êtes de la prise de vue. Elle est également équipée de boutons de déplacement (Up, Down, Right, Left, Select et Reset);
- Un moteur pas à pas 14HS13-0406S pour 18.50 €. Ce moteur est livré avec des câbles nus ; c’est pour ça qu’il en faut commander un second qui est, lui, livré avec la fiche et la carte électronique qui permet de le contrôler ;
- Une allonge 2,1mm avec interrupteur (2.90€) : celle-ci permet, en fonctionnement normal, de ne plus raccorder l’électronique à l’ordinateur, mais directement sur le secteur (j’utilise un adaptateur AC-DC de récupération qui délivre un courant continu de 12 V). Vous n’alimentez la carte électronique qu’au moment de réaliser vos clichés ;
- Un coupleur 5mm-5mm, réf CL1M55N pour 5.90 €. Il s’agit d’une petite pièce en aluminium qui, en se déformant, va reprendre les petits défauts d’alignement entre l’axe du moteur pas à pas et la vis micrométrique ;
- Sur ce site, j’ai également trouvé la petite prise jack 2,5mm stéréo qui me permet de contrôler le déclenchement de mon appareil photo (Canon EOS 600D) – En tapant les mots connectique et la marque de votre appareil photo, vous devriez aussi être en mesure de trouver la bonne référence de pièce.
- Un peu de câble électrique pour relier la prise jack de l’appareil photo au relais 5V
Sur le site Conrad.fr, j’ai commandé les éléments suivants :
- Driver ULN2003A + moteur pas à pas pour 5,90€ : c’est donc un nouveau moteur pas à pas, moins performant que le premier acheté, mais qui a l’avantage d’avoir la carte électronique qui en assure le pilotage et la prise pour l’y raccorder ;
- La carte électronique qui permet le contrôle du déclenchement de l’appareil photo : Velleman module relais 5V SONGLE - SRD-05VDC-SL-C pour 5,72€
Enfin, j’ai réalisé mes derniers achats sur ebay pour raccorder les différentes cartes entre elles ; de petits câbles Dupont – Fil – 10-20 cm pour Arduino. 4 câble mâle-femelle et 5 femelle-femelle sont nécessaires (il m’en reste… C’était 3,18€ le lot de 40 câbles !)
Pour le câblage des divers éléments, il m’a suffi de suivre scrupuleusement les indications données par nos amis de Tournefeuille et qui sont reproduites un peu plus loin.
3 - La pièce de raccord entre le moteur pas à pas et la vis micrométrique a été un peu plus compliquée à réaliser. Je suis parti d’une grosse pointe qui sert d’axe, plantée dans une pièce en bois que j’ai tournée avec ma perceuse jusqu’à rentrer en force dans une section d’un vieux manche à balai métallique. A la scie à métaux, j’ai pratiqué des encoches à l’autre extrémité de mon tronçon de manche à balai et l’ai ajusté sur la vis micrométrique avec un collier de serrage à crémaillère de plombier ! Le club de Tournefeuille a fait fabriquer cette pièce sur mesure en aluminium avec des vis de serrage sur la vis micrométrique. Claude Terschluse a eu la chance de découvrir que la vis micrométrique de son microscope se démontait et laissait place à un axe parfaitement adapté au coupleur !
4 – L’appareil photo est, bien sûr, raccordé à l’ordinateur via un câble USB. Pour travailler depuis l’ordinateur, c’est le logiciel libre « digicamcontrol » qui est utilisé. Il permet, avec le mode LV (Live View) d’observer directement à l’écran et en temps réel l’échantillon à photographier. Vous pouvez choisir l’ouverture et le temps de pose de vos clichés, et vous en voyez immédiatement l’impact à l’écran. Vous pouvez régler vos éclairages, etc… Personnellement, je prépare l’échantillon à photographier sous la bino avec un seul spot orienté sensiblement comme ceux de ma platine ; ça me permet de choisir la face que je veux faire briller (la boîte de l’échantillon est placée dans une balle de ping-pong découpée et lestée de plombs de rideaux et le tout est placé sur un rouleau de scotch). Lorsque la séquence de prises de vue va démarrer, il faut bien sûr sortir du mode Live View pour que la carte Arduino prenne le relai sur le contrôle de l’appareil photo.
5 - La programmation de la carte Arduino : celle-ci se fait sur l’ordinateur après avoir chargé les bibliothèques arduino (ou libraries en anglais – stepper pour le moteur pas à pas, liquidcrystal, etc…), puis elle est téléversée vers la carte. Vous pouvez alors débrancher celle-ci de l’ordinateur, elle peut travailler seule. La programmation que j’utilise, largement inspirée de celle réalisée par Olivier Hamann du club Béryl de Tournefeuille, fonctionne de la façon suivante : je commence par choisir le champ pris en photo (de 1 à 8 mm – Voir paragraphe suivant), puis à l’aide de la grosse vis du microscope, je positionne mon échantillon tout au fond de la profondeur de champ que je veux donner à mon cliché (au pied du cristal, par exemple) ; j’appuie alors sur le bouton « Right ». Le moteur pas à pas va alors se mettre en route pour faire descendre la platine et je suis la progression de la mise au point sur l’écran de l’ordinateur. Quand j’estime être arrivé au premier plan de ma photo (ou quand la netteté se fait sur la pointe du cristal), j’appuie sur la touche « Select ». J’ai alors quelques secondes pour sortir du mode Live View avant que ne démarre la séquence de prises de vues. Mon appareil photo est en mode de prise de vue manuel avec un retardateur de 2 secondes. Le déclenchement et le mouvement vertical se font en même temps. La prise de vue se fait 2 secondes plus tard. Le cahier ne se prête pas à la publication du programme de la carte Arduino. Celui-ci est accessible sur simple demande qui me serait adressée (micromineral38@gmail.com ).
6 – Détermination du champ et du déplacement vertical entre deux clichés : l’idée de ce paragraphe, c’est de ne prendre que le nombre nécessaire de clichés. Je me suis construit une petite mire avec des demi-graduations en vis-à-vis au maximum de ce que mon imprimante me permettait de faire. J’ai placé cette mire dans une ‘cage’ et celle-ci fait un angle d’environ 20° avec un plan horizontal. J’ai ainsi pu, suivant toutes les configurations optiques de mon montage prendre la mire en photo et déterminer la profondeur de champ en nombre de graduations nettes de ma mire (et je ne joue pas sur l’ouverture…). Je suis parti du principe qu’une graduation devait être nette sur 3 clichés pour déterminer le coefficient multiplicateur intégré dans le programme Arduino. Ainsi, je commence par sélectionner avec le bouton « LEFT » ma largeur de champ. C’est elle qui va déterminer mon déplacement vertical entre deux clichés.
Détail des branchements :
Le moteur pas à pas 14HS13-0406S doit donc être raccordé à la carte ULN 2003A. Pour cela, on coupe les câbles du moteur acheté chez Gotronic.fr et on raccorde suivant le schéma suivant :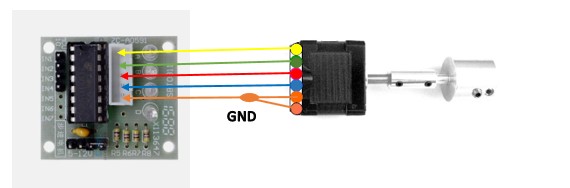
Les câbles orange et marron sont réunis pour être raccordée à la terre (GND) sur la dernière fiche.
L’écran à cristaux liquides se fiche directement sur la carte Mega 2560 comme sur la photo ci-dessous de telle sorte à laisser libre les fiches 14 à 21 d’un côté et A6 à A15 de l’autre
Le contrôleur du moteur pas à pas se raccorde ainsi : 2 câbles femelle-femelle vers les fiches d’alimentation de la carte avec l’écran LCD : ‘-‘ vers fiche noire ‘GND’ et ‘+’ vers fiche rouge ‘5V’ et les fiches IN1, IN2, IN3 et IN4 vers, respectivement, 23, 24, 25 et 26, de la carte MEGA 2560 avec des câbles femelle-mâle.
Le relai déclencheur de l’appareil photo : pour l’alimentation, deux câbles femelle-femelle : ‘-‘ vers fiche noire ‘GND’, ‘+’ vers fiche rouge ‘5V’ (Carte de l’écran LCD) et pour la commande 1 câble femelle-mâle vers la fiche 41 de la carte MEGA 2560.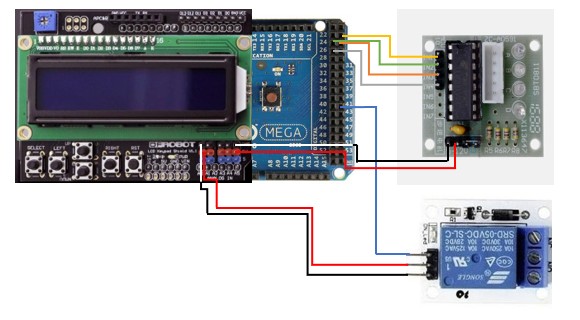
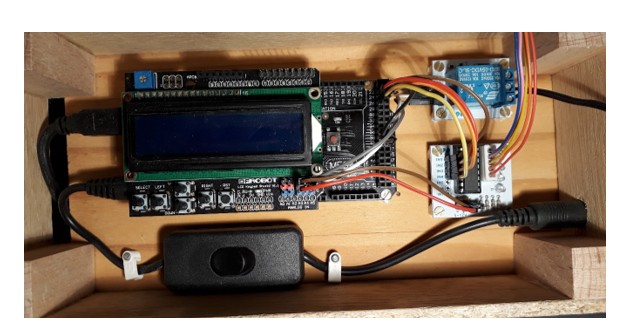
Le dispositif mis en place ; les différents éléments sont vissés en fond de boîte. En haut à gauche : le câble vers le port USB de l’ordinateur et en bas à droite, le raccord à l’alimentation électrique 12V.
![]()
